「カメラモデル」の版間の差分
提供: メモ帳@fmaj7b5.info
(初版) |
2011年2月20日 (日) 16:02時点における版
目次 |
ピンホールカメラ
迷ったら、コレ。
画像座標を 、3次元座標を
、3次元座標を とすると、
とすると、

で表される。ただし、 はそれぞれ画像座標と3次元座標の同次座標、
はそれぞれ画像座標と3次元座標の同次座標、 は3x4行列、
は3x4行列、 は0でない任意の定数とする。
は0でない任意の定数とする。
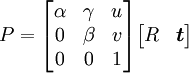
射影行列の例
は3x3内部パラメータ行列 、3x4外部パラメータ行列
、3x4外部パラメータ行列![[R | \boldsymbol{t}]](/wiki/images/math/1/5/b/15b2824d503d34f0b270f644a1e94b1f.png) に(だいたい)分ける事ができる。
に(だいたい)分ける事ができる。
![P = K [R | \boldsymbol{t}]](/wiki/images/math/8/a/d/8adeeb8b9bbf70ae558168e382fa7b91.png)
なおは上三角行列、 はそれぞれカメラから見た世界座標系の軸の向き(回転行列)、原点の位置を表す。
で、には定数倍の不定性があるので、と任意の0でない定数
はそれぞれカメラから見た世界座標系の軸の向き(回転行列)、原点の位置を表す。
で、には定数倍の不定性があるので、と任意の0でない定数 を掛けた
を掛けた は同じ変換を表す。
は同じ変換を表す。
普通のカメラ
自由度は内部パラメータ5、外部パラメータ6(回転3、並進3)の計11。
内部パラメータの(3, 3)成分を1しばりにすれば、定数倍の不定性が除去できる。
一般カメラ
要はパラメータが物理的なものと関係なくてもよいというだけ。12個の成分を持ったただの行列。
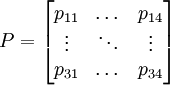
ただし、定数倍の不定性があるので独立な成分は11個だけ。